免費建立商鋪,與百萬浙商做生意!
APON無線定位測距儀(以下簡稱APON)是一種高精度測速測距、實時定位系統,模塊采用獨特的應答式雷達測距原理,通過在兩套模塊之間發送和接收信號實現計算,用于對設備移動過程中進行實時定位和速度檢測。
APON無線定位測距儀由定位硬件層、數據處理層組成。定位硬件層是APON實現定位功能的主體部分,包括基站天線和移動天線(兩模塊可互換);數據處理層則是實現位置計算和速度計算的關鍵。根據項目實際需要,基站天線是定位系統的基準錨點,其位置和安裝角度固定,為系統確定了空間坐標基準;移動天線是移動的,可實時獲取周圍基站天線的位置,由控制解算模塊計算設備本身的位置和速度。
APON無線定位測距儀技術原理
APON測速測距功能基于模塊采用獨特的應答式雷達測距原理,算法概述如下:
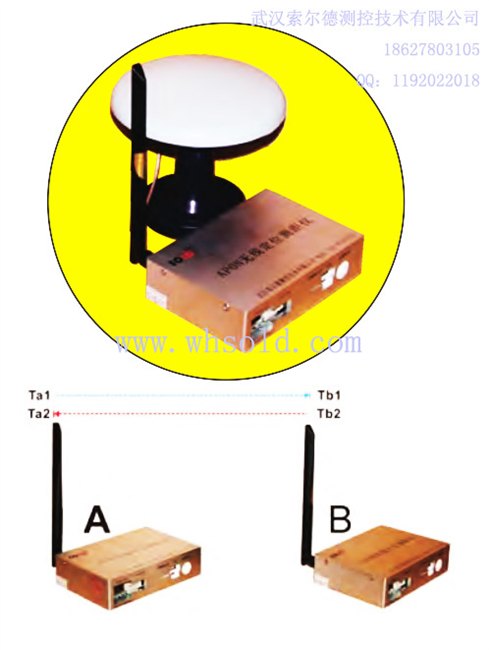
每個模塊從啟動開始即會生成一條獨立的時間戳。模塊A的發射機在其時間戳上的Ta1發射請求性質的信號,模塊B接收機在其時間戳上的Tb1接收到該信號。對信號加以一定的處理手段后,模塊B在Tb2時刻發射一個響應性質的信號,被模塊A在自己的時間戳Ta2時刻接收。由此可以計算出信號在兩個模塊之間的應答時間,從而確定距離。
計算公式如下:S=C*【(Ta2-Ta1)-(Tb2-Tb1)】/2
其中C為光速,S為要計算的距離,Ta1、Ta2、Tb1、Tb2為時間戳。
在測速方面,系統根據測距所得數據,由卡爾曼Kalman濾波的最優回歸方程計算出模塊之間的徑向速度。
