免費建立商鋪,與百萬浙商做生意!
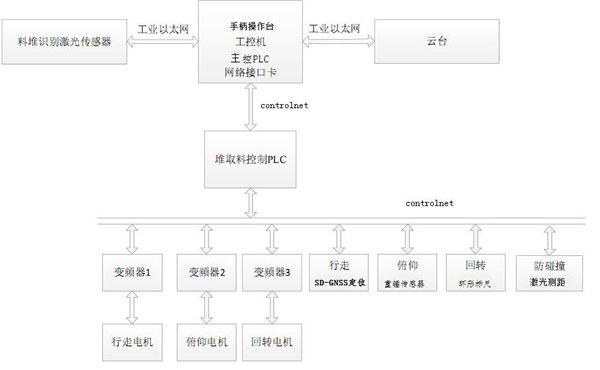
大棚堆取料機制造廠家_立體倉庫物流管理系統廠家_武漢索爾德測控技術有限公司目前,我國的散貨(礦石、煤等)料場主要采取斗輪式取料機進行取料作業,尤其是在大型散貨碼頭,原料的大量需求造就了巨型的堆場,這就要求有一定數量的取料設備來進行生產,同時需配備相應數量的操作司機來駕駛這些設備。因此,如何提高取料效率、改善作業環境、降低勞動強度,降低人工成本、減少人工干預造成的效率降低就成了所有大型散貨碼頭面臨的共同課題。散貨取料裝船流程的效率高低,是直接制約港口裝船疏港效率的主要環節,智能化取料研究與應用,就是針對取料機現有的作業模式和取料工藝進行研究,通過對取料機PLC程序及上位機軟件進行合理優化和二次開發,并借助先進的設備和技術手段以實現取料機機智能化提高的同時,提高作業效率,并兼顧人力成本的節省。本項目具有以下現實意義:?改善勞動環境和降低勞動強度?減少人為因素的影響和人力投入?提高堆、取料機的自動化作業程度并穩定生產運行?提高碼頭整體智能化作業管理水平?保持行業技術先進性。對與單機全自動系統而言,全自動化的硬件控制設備都在堆取料機中,主要包括PLC、激光料堆掃描,實時大機行走定位,俯仰角測量,旋臂角度測量各類輔助裝置等;料堆掃描裝置完成料堆原始三維數據及預處理,通過處理后的數據形成實時的模型;根據對取料機控制策略,完成斗輪堆取料機自動作業;堆取料機異常狀態檢測,防止碰撞、過載等異常情況的發生;控制中心設置人工干預裝置如手柄操作盤等,當堆取料機工作出現異常時,可以進行人工干預,主要包括停機,暫停堆取料、大車后退、大臂旋轉等操作;單機PLC作為控制中心,需根據主控PLC傳送過來的堆取料任務的范圍,實現堆取料的邏輯控制及其操作的實現。采用PLC控制系統,變頻調速,輔助檢測設備(料堆掃描儀、位置檢測裝置、工控機,皮帶檢測,攝像頭裝置等)來實現堆取料機的自動控制;堆取料自動控制中采用現場ControlNet,總線和工業以太網總線方式進行數據交換;三維數據采集模塊。負責堆取料機的實時位置信息的采集、激光掃描裝置的實時數據的采集,并將采集來的數據進行初步處理,形成料堆表面的三維點云數據。(2)三維數據計算模塊。負責接三維采集模塊形成的點云數據,根據點云數據重構料堆的三維模型數據庫等。(3)三維數據接口模塊。負責三維數據計算模塊與計算機主控程序間的通信。(4)計算機主控模塊。負責自動堆取料全過程中的控制,包括根據作業任務生產控制指令,堆取料過程中的控制與修正,取料切入點的計算,大車寸動,取料效率的提高等。(5)主控PLC數據通信模塊。負責PLC控制系統的定時,事件觸發,請求等數據通信。(6)激光掃描儀控制模塊。負責驅動激光掃描儀的轉動,遠程配置等。(7)堆取料機的PLC控制模塊。負責接收作業任務,并根據作業任務自動完成堆取料作業,包括堆取料機的自動對位,堆取料過程中的大車寸動,取料過程中的切入點的控制,恒流量控制,軟、硬件防碰撞控制,人工遠程干預的實現等。(8)人機操作界面軟件。直觀可視的操作界面,包含了針對作業大機的各項參數顯示欄以及可控制和修改實際作業流程的具體按鍵。操作員可以通過畫面上的實時數據顯示和操作按鍵,在中控室里進行遠程監測和控制現場的堆料作業,也是實現自動化取料的人機交互系統。(9)防碰撞模型軟件。用于在中控室3D實時顯現單機的工作狀態信息,包括單機的在堆場的位置信息,懸臂的方位信息,懸臂的俯仰角度信息;其中單機之間有碰撞危險時發出警報;還可以設定保護值,當單機之間距離接近保護值,給主控PLC發出停機信號;本系統中斗輪堆取料機單機全自動化系統工作過程如下:首先是工作人員下達任務單,控制中心的工業控制機(IPC)的中控處理單元對任務單進行處理,分析出是堆料或取料工作,并計算出的堆、取料的坐標范圍IPC將堆取料的工作方式及其范圍坐標等數據傳輸至主控PLC中,PLC根據是堆料或取料工作采取不同的控制策略。堆取料機在自動取料或堆料過程中都需要確定自身的實時位置,主要包括斗輪堆取料機的懸臂回轉、懸臂俯仰與大車行走等三大運轉機構。這三大運轉機構的準確定位關系著自動堆取料中的落料點與切入點的控制以及料堆的三維識別。1.取料全自動化堆料作業中首先是對料堆的三維識別,料堆的三維識別通過激光掃描儀的方法來實現。掃描儀在獲取料堆的原始三維數據后,需對料堆表面的三維數據進行濾除噪聲點、數據精簡等預處理,預處理的數據可以用來進行料堆的三維建模,同時也可知道自動取料所需的坐標數據。PLC控制系統根據料堆三維識別中得到的取料起始坐標與SOLD-GNSS定位裝置,控制斗輪堆取料機及其斗輪移動到取料初始位置,也即實現了碼頭智能取料技術研究與應用實施后,明顯提升港口設備自動化、信息化水平,為全面建設數字化港口奠定基礎,減少人工干預,提高調度指揮效率,同時可有效降低人工成本,改善工作環境,提升安全水平,使各班組作業效率均接近或達到目前平均水平。1)以每艘待載船舶有五個貨艙計,每個貨艙上料兩輪,每個艙每次上料時調度指令由下發到執行需2分鐘計,則一條船舶所需此類時間為20分索爾德測控技術|||大棚堆取料機制造廠家_立體倉庫物流管理系統廠家_武漢索爾德測控技術有限公司
