免費建立商鋪,與百萬浙商做生意!網(wǎng)會員")
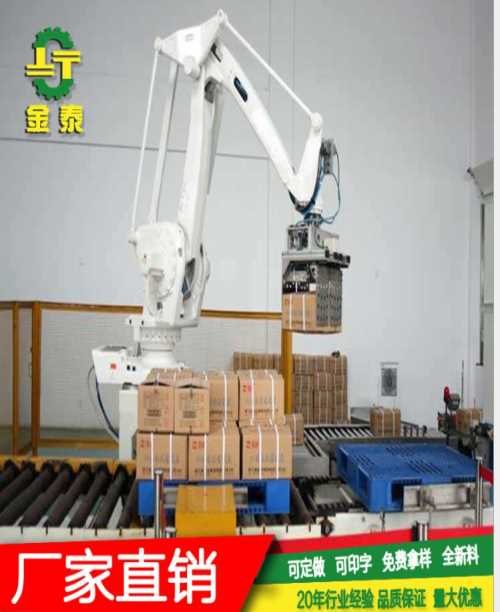
搬運機器人【transferrobot】是可以進行自動化搬運作業(yè)的工業(yè)機器人。[1] 最早的搬運機器人[2] 出現(xiàn)在1960年的美國,Versatran和Unimate兩種機器人首次用于搬運作業(yè)。搬運作業(yè)是指用一種設備握持工件,是指從一個加工位置移到另一個加工位置。搬運機器人可安裝不同的末端執(zhí)行器以完成各種不同形狀和狀態(tài)的工件搬運工作,大大減輕了人類繁重的體力勞動。世界上使用的搬運機器人逾10萬臺,被廣泛應用于機床上下料、沖壓機自動化生產(chǎn)線、自動裝配流水線、碼垛搬運、集裝箱等的自動搬運。部分發(fā)達國家已制定出人工搬運的最大限冂度,超過限度的必須由搬運機器人來完成。搬運機器人是近代自動控制領域出現(xiàn)的一項高新技術,涉及到了力學,泰金智能設備,.泰金智能設備,r智能搬運機器人報價,衡水泰金智能設備開發(fā)有限公司,泰金智能設備,.泰金智能設備,r智能搬運機器人報價,衡水泰金智能設備開發(fā)有限公司,機械學,電器液壓氣壓技術,自動控制技術,傳感器技術,單片機技術和計算機技術等學科領域,已成為現(xiàn)代機械制造生產(chǎn)體系中的一項重要組成部分。它的優(yōu)點是可以通過編程完成各種預期的任務,在自身結(jié)構(gòu)和性能上有了人和機器的各自優(yōu)丬勢,尤其體現(xiàn)出了人工智能和適應性。工業(yè)機器人由主體、驅(qū)動系統(tǒng)和控制系統(tǒng)三個基本部分組成。主體即機座和執(zhí)行機構(gòu),包括臂部、腕部和手部,有的機器人還有行走機構(gòu)。大多數(shù)工業(yè)機器人有3~6個運動自由度,其中腕部通常有1~3個運動自由度;驅(qū)動系統(tǒng)包括動力裝置和傳動機構(gòu),用以使執(zhí)行機構(gòu)產(chǎn)生相應的動作;控制系統(tǒng)是按照輸入的程序?qū)︱?qū)動系統(tǒng)和執(zhí)行機構(gòu)發(fā)出指令信號,并進行控制。工業(yè)機器人按執(zhí)行機構(gòu)運動的控制機能,又可分點位型和連續(xù)軌跡型。點位型只控制執(zhí)行工業(yè)機器人機構(gòu)由一點到另一點的準確定位,適用于機床上下料、點焊和一般搬運、裝卸等作業(yè);連續(xù)軌跡型可控制執(zhí)行機構(gòu)按給定軌跡運動,適用于連續(xù)焊接和涂裝等作業(yè)。業(yè)機器人按程序輸入方式區(qū)分有編程輸入型和示教輸入型兩類。編程輸入型是將計算機上已編好的作業(yè)程序文件,通過RS232串口或者以太網(wǎng)等通信方式傳送到機器人控制柜。示教輸入型的示教方法有兩種:一種是由操作者用手動控制器(示教操縱盒),將指令信號傳給驅(qū)動系統(tǒng),使執(zhí)行機構(gòu)按要求的動作順序和運動軌跡操演一遍;另一種是由操作者直接領動執(zhí)行機構(gòu),按要求的動作順序和運動軌跡操演一遍。在示教過程的同時,工作程序的信息即自動存入程序存儲器中在機器人自動工作時,控制系統(tǒng)從程序存儲器中檢出相應信息,將指令信號傳給驅(qū)動機構(gòu),使執(zhí)行機構(gòu)再現(xiàn)示教的各種動作。示教輸入程序的工業(yè)機器人稱為示教再現(xiàn)型工業(yè)機器人。.泰金智能設備___r智能搬運機器人報價
關于我們 | 友情鏈接 | 網(wǎng)站地圖 | 聯(lián)系我們 | 最新產(chǎn)品
![]() 浙江民營企業(yè)網(wǎng) sz-yuerui.com 版權所有 2002-2010
浙江民營企業(yè)網(wǎng) sz-yuerui.com 版權所有 2002-2010
浙ICP備11047537號-1
