免費建立商鋪,與百萬浙商做生意!
汽車非接觸式產品檢測
杭州聚康汽配科技有限公司是一家集研發、經營、服務于一體的現代技術型企業,主要從事汽車科技研發、電動及配件外觀結構設計的技術領域開發及成果產業化。公司組建了一套專業完善的設計開發服務體系,并長期參與上汽集團、波導汽車、北京羅斯德爾、浙北宏宇汽車、金龍客車等知名企業相關整車以及變速箱控制器產品的設計開發,屆時在汽車行業也有一定的影響力。同時與浙江大學等國內著名院校、科研機構建立了長期密切的合作關系,并且建有相應的合作技術團隊,以保證技術的不斷創新和領先。
企業現擁有三坐標測量機、便攜式手持激光掃描儀、便攜式光筆測量儀、真空注型機以及3D激光打印等齊全的輔助加工設備,旗下并聯盟多家知名模具生產制造型企業為供應商,為客戶提供全方位的產品設計、制造服務。
> > 主營業務> >
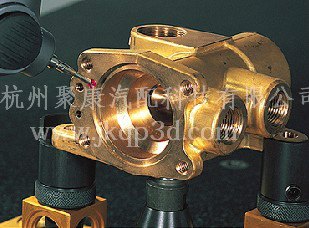
技術服務類:汽車整車、汽車內外飾件、及汽車車燈;汽車零部件產品測量檢測、精度對比、激光掃描及3D打印為一體的產品設計開發服務;
產品銷售類:整車,車燈、保險杠、電動踏板、后視鏡、排氣管以及汽車個性化產品。
此外,公司也將聯合浙江大學研發新型安全技術裝置,如防誤踩油門安全裝置,疲勞駕駛監控裝置等。
便攜手持式三維激光掃描技術是一種先進的全自動高精度立體掃描技術,又稱為“實景復制技術”,是繼GPS空間定位技術后的又一項測繪技術革新,將使測繪數據的獲取方法、服務能力與水平、數據處理方法等進入新的發展階段。傳統的大地測量方法,如三角測量方法,GPS測量都是基于點的測量,而三維激光掃描是基于面的數據采集方式。三維激光掃描獲得的原始數據為點云數據。點云數據是大量掃描離散點的結合。三維激光掃描的主要特點是實時性、主動性、適應性好。三維激光掃描數據經過簡單的處理就可以直接使用,無需復雜的費時費力的數據后處理;且無需和被測物體接觸,可以在很多復雜環境下應用;并且可以和GPS等集合起來實現更強、更多的應用。三維激光掃描技術作為目前發展迅猛的新技術,必定會在諸多領域得到更深入和廣泛的應用。
對空間信息進行可視化表達,即進行三維建模,通常有兩類方法:基于圖像的方法和基于幾何的方法。基于圖像的方法是通過照片或圖片來建立模型,其數據來源是數碼相機。而基于幾何的方法是利用三維激光掃描儀獲取深度數據來建立三維模型,這種方法含有被測場景比較精確的幾何信息。
三維建模的步驟:
三維激光掃描系統采集的數據為點云數據,點云數據處理一般包含下面幾個步驟:噪聲去除、多視對齊、數據精簡、曲面重構。
噪聲去除指除去點云數據中掃描對象之外的數據。在掃描過程中,由于某些環境因素的影響,比如移動的車輛、行人及樹木等,也會被掃描儀采集。這些數據在后處理就要刪除。
多視對齊其指由于被測件過大或形狀復雜,掃描時往往不能一次測出所有數據,而需要從不同位置、多視角進行多次掃描,這些點云就需要對齊、拼接稱為多視對齊。點云對齊、拼接可以通過在物體表面布設同名控制點來實現。
點云的數據精簡指的是由于點云數據是海量數據,在不影響曲面重構和保持一定精度的情況下需要對數據進行精簡。常用的精簡方法可采用下列方式:平均精簡——原點云中每n個點保留1個;按距離精簡——刪除一些點后使保留的點云中點與點間的距離均大于某值。
為了真實地還原掃描日標的本來面日,需要將掃描數據用準確的曲面表示出來,這個過程叫曲面重構。曲面常見表示種類有:三角形網格,細分曲面,明確的函數表示,暗含的函數表示,參數曲面,張量積B樣條曲面,NURBS曲面,曲化的面片等。