免費建立商鋪,與百萬浙商做生意!
堆、取料機是散貨料場專用堆取設備,一般用于碼頭裝卸散裝物料、原料場堆放物料等場合,堆料機連續均勻地將進料沿直線方向堆成多層相互平行、上下重疊的料層,取料機在垂直于料層方向的截面上切取一定厚度的所有料層的物料,使各層成分各異的物料得到混合,從而達到均化物料的目的。
在堆取料機自動化控制過程中,系統必須對堆取料機所在料端、倉位進行識別。在多臺堆取料機綜合堆場和堆取料機無人值守遠地操作時,對位置識別的準確性和通信可靠性的要求更高。實現堆取料機的實時位置監控和防碰報警,對散貨料場的安全生產,提高堆取料機的生產管理水平有著十分重要的意義。
目前很多重大型有軌搬運設備作業過程中都是人眼監測大機位置,稍微先進點的是安裝旋轉編碼器設備來檢測大機位置,而懸臂回轉中心角度和上下俯仰角度目前大多由大機廠內嵌旋轉編碼器來檢測,由于旋轉編碼器是接觸式檢測,損壞率一直居高不下。下面針對旋轉編碼器特點分析下:絕對型旋轉編碼器的每個位置是唯一的,無需記憶,無需找參考點,而且不用連續計數,什么時候需要知道位置,什么時候就去讀取它的位置。這樣數據可靠性大大提高。由于絕對型旋轉編碼器是由一套精密機械完成位置計數,在使用中也存在易錯碼易損壞的缺陷。由于編碼器測量位移固有的特點,總避免不了由于移動車輛自身頻繁啟停所導致的滑動累積誤差和機車行走過程中車輪的打滑位移誤差,實踐表明這種誤差程度影響到其所提供的位置信息的合理性,無法利用其對移動大機進行相關控制。旋轉編碼器是一種相對定位的方式。編碼器主要優點是成本低。缺點是車輪打滑,定位不準,易損壞,不耐高溫,維護工作量大,目前從眾多現場使用情況看,旋轉編碼基本上在使用半年后就會癱瘓,最后定位功能就此費掉;
所以將旋轉編碼器用在大機水平位置檢測和回轉中心角度、懸臂俯仰角位置檢測均存在半年左右后癱瘓的結果,由此防碰撞功能盡失,對已經依靠此防碰撞系統操作人員來說,就會構成慣性生產安全事故。
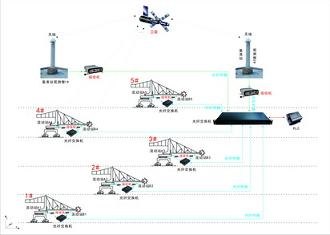
GPS在物流領域已被廣泛應用,可在環境惡劣場所工作、不易受外界干擾、定位精度高、投資成本較低,本系統采用雙GPS檢測堆取料機的位置與轉向/府仰角度,確定機械主機及前端的作業位置,實現堆取料機的實時位置監控和防碰報警;所有實時工況均在一臺控制計算機屏幕上顯示,實現多臺堆取料機的集中監視和管理。
本項目提供了針對碼頭的多臺堆取料機的GPS高精度定位應用,實現相鄰機械間的防撞自動控制,并提供了直觀的圖形化仿真監控軟件,實時及事后回放碼頭的機械作業動態情況。
GPS基準站分系統產生GPS差分改正數,通過無線數傳網絡向堆取料機上的GPS設備播發,各GPS設備接收GPS基準站播發的差分改正數,實現RTK高精度定位,并利用雙GPS的相對定位數據計算出堆取料機機身和懸臂頂端當前的實時高精度位置,堆取料機的位置經過綜合處理后,通過無線數傳網絡發送給基準站,轉發到中心控制服務器,經綜合處理后,監控系統在地圖上實現對各堆取料機的位置狀態的實時監控。
移動站分系統同時接收中心監控分系統發送過來的安全報警與控制指令信息,從而提醒司機避免事故的發生,并自動通過PLC實現大車的減速、停止等控制。
監控分系統根據位置信息和機械狀態信息動態監控,并對各大機之間的位置關系進行實時判斷檢測,當距離進入危險防撞預設距離時,產生報警與自動控制指令發給相應的移動站,并根據報警信息進行報警提示;監控分系統將所有的實時信息存入數據庫,并可根據中心數據庫的存檔信息進行事后查詢和回放以及統計分析。
功能內容
(1)網絡通信
建立基于數字電臺的GPS差分數據無線播發網絡;
利用大機的光纖通訊網絡實現機械位置(含懸臂姿態)以及報警自動控制指令信息的數據雙向通訊。
(2)堆取料機的智能定位及可視化監控
機械位置定位:GPS定位終端利用兩臺GPS的定位,實時準確檢測到機械的定位位置坐標以及機身、懸臂的姿態狀態,精度達到厘米級;
機械實時監控:在中控室提供集中的卸船機與堆、取料機位置的實時可視化直觀顯示;以電子地圖為背景實時顯示各堆、取料機(包括機身及懸臂)的當前位置;
(3)生產作業安全管理
當相鄰的兩臺堆取料機之間大機距離以及懸臂頂端的間隔距離小于相關設定值時進行報警提示;并通過PLC控制機身或懸臂的移動,防止碰撞發生。
(4)定位數據自動存檔、事后軌跡查詢
對大機的定位與作業狀態信息進行自動存檔;
可對任意時段的歷史數據進行查詢回放;同樣以可視化地圖形展示機械的作業過程。
技術指標:
測量精度:±20cm
測量范圍:0-10km
數據通訊方式:RS232/RS485/以太網
環境溫度:-30℃~70℃
刷新間隔:≥100ms
機柜安裝位置:室內室外均可
饋線長度:≤30米
外殼防護等級:IP45(室內)/ IP67(室外)
功耗:24VDC,≤50W
系統初始化時間:≤3分鐘
